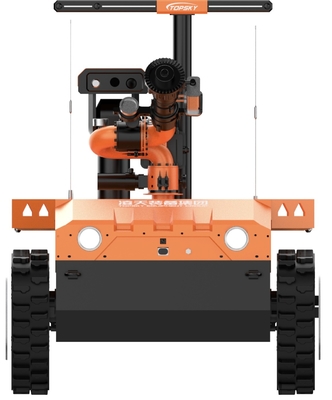
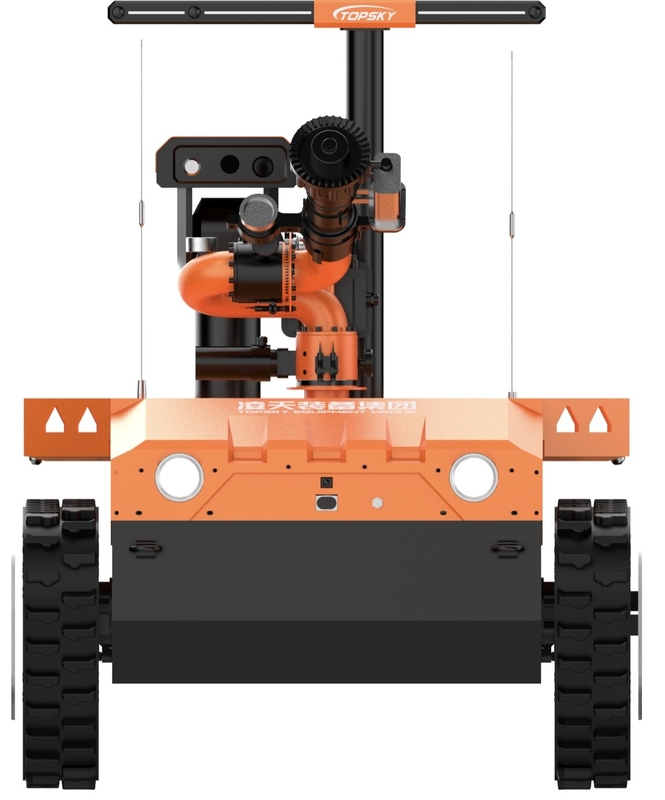
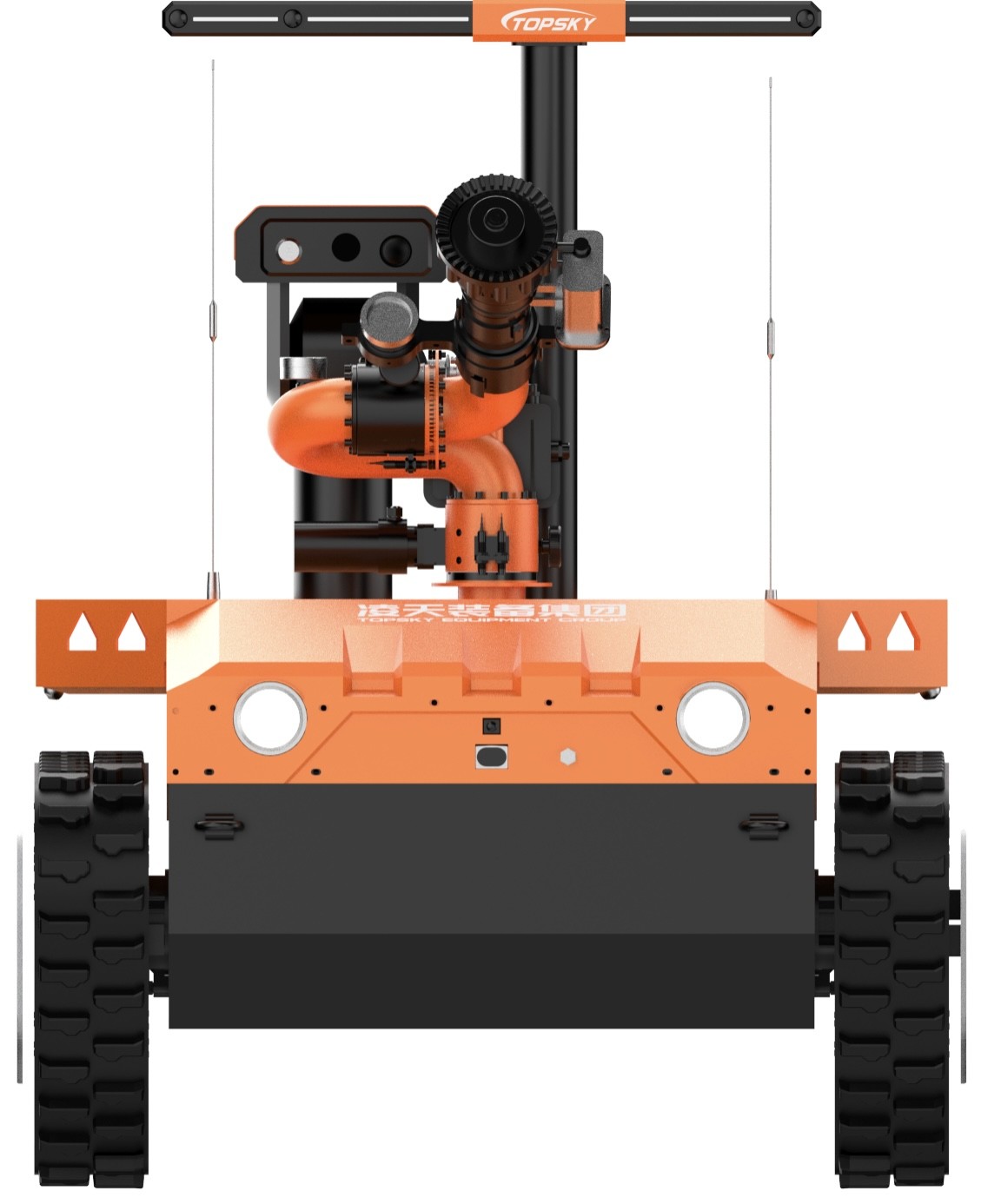
3.1 Весь робот
- Название: взрывостойкий пожарный и разведывательный робот
- Модель: RXR-MC80BD
- Основная функция: используется для перевозки нескольких устройств или спасательного оборудования и материалов.
- Соответствие стандартам пожарной промышленности: "GA 892.1-2010 Роботы для тушения пожаров - Часть 1: Общие технические условия"
- Соответствие стандартам взрывостойкости: GB3836.1 2010 "Взрывоопасные атмосферы - Часть 1: Оборудование - Общие требования", в соответствии с GB3836.1-2010 "Взрывоопасные атмосферы - Часть 2:Оборудование, защищенное огнеупорным корпусом" и GB3836.4 2010 г. Национальные стандарты "Взрывоопасные атмосферы - Часть 4: Оборудование, защищенное внутренней безопасностью".
- Противовзрывный тип: Вся машина: Exd[ib]IIBT4Gb, устройство питания литийными батареями: Ex d IIC T6 Gb
- Степень защиты: корпус робота имеет степень защиты IP65, а верхняя часть робота имеет степень защиты IP67.
- Мощность: электрическая, тернарная литийная батарея
- Размеры: длина 1800 мм * ширина 1310 мм * высота 1650 мм (за исключением универсальных соединений, самоотсоединяющихся частей и антенн)
- Диаметр поворота: ≤ 2600 мм
- Масса: ≤ 890 кг
- Сила тяги: ≥6500N
- Расстояние буксировки: ≥ 120 м (буксировка двух полностью заполненных пожарных шлангов DN80)
- Максимальная линейная скорость: ≥2,0 м/с, с бесступенчатым регулированием скорости посредством дистанционного управления
- Отклонение по прямой: ≤ 0,3%
- Дистанция торможения: ≤ 0,3 м
- Способность к подъему: ≥83,9% (или 40°)
- Высота перехода через препятствие: 300 мм
- Угол устойчивости наклона в сторону: 40°
- Глубина промывки: ≥ 500 мм
- Время непрерывной ходьбы: 3 часа
- Надежное время работы: сдано 16-часовое непрерывное испытание на стабильность и надежность
- Расстояние дистанционного управления: 1100 м.
- Расстояние передачи видео: 1100 м
- Грузоподъемность: имеет собственную грузовую раму, которая может перевозить спасательные материалы (такие как пожарные шланги, газовые маски, респираторы под положительным давлением, огнестойкая одежда, инструменты для разрыва и т. д.).) на место бедствия; он может буксировать спасательную машину на спасательное место; он может буксировать препятствия через буксировочное кольцо.
- Панорамная функция мониторинга: может удаленно отображать 360-градусное изображение тела робота.
- Функция отображения настроения: она определяет угол наклона и угол проката робота в режиме реального времени, что позволяет операторам в режиме реального времени понять состояние робота.Значения отправляются обратно в конце дистанционного управления для правильной команды и работы в следующем шаге.
- Автономная функция избегания препятствий: взрывостойкий лазерный радар избегания препятствий имеет диапазон обнаружения 50 метров.Он движется вперед с половиной скорости.Когда на пути в 2 метра от него появляется препятствие, он автоматически останавливается.
- Функция автоматического распыления и охлаждения: имеет трехслойный водозащитный занавес самораспыления и охлаждения для распыления и охлаждения тела робота, образуя водозащитную занавес, покрывающую весь робот,обеспечивая, чтобы батарея робота, двигатель, система управления и ключевые компоненты могут работать нормально в условиях высокой температуры.
- Автоматическая генерация энергии и функция подавления отталкивания:Главный двигатель робота использует регенеративное торможение для преобразования силы отталкивания в электрическую энергию во время распыления воды и тушения пожаров.
- Огнеупорный полётчик робота (необязательно): полётчик для пожарного робота должен быть изготовлен из огнеупорного, антистатического и высокотемпературного каучука.Внутренняя часть ползучего - металлическая рама, и он имеет конструкцию защиты от выхода из рельсов ползучей машины.
- Функция противопожарного шланга (необязательно): с помощью двойной универсальной структуры соединения он может вращаться на 360 градусов, чтобы предотвратить узло пожарного шланга.
- Функция автоматического отсоединения пожарного шланга (необязательно): пожарный шланг может быть автоматически отсоединен с помощью дистанционного управления, чтобы гарантировать, что робот может легко вернуться после выполнения задачи.
- Терминал управления: портативный интегрированный терминал дистанционного управления для графики и передачи данных.
3.2 Роботная система пожаротушения
- Пожарный монитор: внутренний взрывозащищенный пожарный монитор / импортный пожарный монитор
- Типы огнетушителей: вода или пены
- Материал: корпус монитора - из нержавеющей стали, голова монитора - из твердого анодированного алюминиевого сплава
- Рабочее давление (MPa): 1.2
- Режим распыления: постоянный ток и атомизация, непрерывно регулируемый
- Поток воды/пенообразования: ≥80,6 л/с для воды, 65 л/с для пены
- Диапазон (м): ≥ 85
- Угол вращения: горизонтальный -90°~90°, вертикальный 0°~90°
- Максимальный угол распыления: 120°
- Следовательная камера: имеет следящую камеру для мониторинга воды с разрешением 1080P.
- Инфракрасная функция слежения за теплым зрением (по желанию): имеет функцию слежения за теплым зрением в инфракрасном диапазоне, которая обнаруживает и отслеживает источники тепла с помощью инфракрасной термической визуализации.
- Монитор огневой воды может распылять воду, пену и смешанную жидкость.что один монитор многофункционален и способен переключаться между режимами постоянного тока и распыливания.
3.3 Система разведки роботов
Конфигурируя бортовое оборудование, такое как газовые счетчики, модули мониторинга окружающей среды, инфракрасные камеры, инфракрасные термоизоляторы и пикапы, он может удаленно распознавать токсичные и вредные газы,условия окружающей среды, видео и аудио на месте аварии.Взрывостойкая подъемная платформа оснащена датчиками и камерами для обнаружения и анализа токсичных и горючих газов., аудио и видео, и окружающей среды на различных высотах на месте.
- Конфигурация системы разведки: 6 бортовых инфракрасных камер, 1 камера термоизоляции, 1 детектор многопараметров и 1 детектор температуры и влажности.
- 360° Поворачивающаяся подъемная платформа Высота подъема: начальная высота: 1460 мм, высота подъема: 2550 мм. Платформа наклона -90°~90°, горизонтальное вращение 360°.
- Модуль обнаружения газа и окружающей среды: оборудован беспроводной системой быстрого обнаружения аварийного спасения и детектором температуры и влажности, способной обнаруживать:
CO2: 0 - 5%VOL
CH4: 0 - 100%VOL
СО: 0 - 1000 ppm
H2S: 0 - 100 ppm
CL2: 0 - 1000 ppm
NH3: 0 - 100 ppm
O2: 0 - 30% O2
H2: 0 - 1000 ppm
SO2: 0 - 20 ppm
NO2: 0 - 20 ppm
C3H8 (пропан): 0-100 ppm
- Функция измерения инфракрасной температуры:Инфракрасные датчики температуры устанавливаются внутри и снаружи транспортного средства для мониторинга внутренней температуры кузова транспортного средства и температуры на месте (-50 - 350°C).
3.4 Робот с видео- и аудиодатчиками
- Количество и конфигурация камер: видеосистема состоит из 6 фиксированных инфракрасных камер высокой четкости на корпусе, позволяющих видеть 360° вокруг.
- Освещение камеры: камеры на корпусе могут обеспечивать четкое изображение при низком освещении 0,001 LUX и имеют динамическую функцию противотресания.Камеры должны быть способны эффективно и четко собирать условия на месте даже при нулевом освещении и отображать их на жидкокристаллическом экране операционного терминала..
- Пиксель камеры: Megapixel изображение высокой четкости, разрешение 1080P, широкоугольный 60°
- Разрешение камеры: 1080p
- Степень защиты камеры: IP68
- Технические требования к сбору звука: он может удаленно собирать звуки на месте, чтобы понять ситуацию людей, застрявших в ловушке.диапазон частот составляет 20 Hz - 20 kHz, а чувствительность ≥ 40 дБ.
- Инфракрасный тепловизор (необязательно):
- Разрешение 384 × 288
- Диапазон измерения температуры -20°C - 150°C или 0°C - 550°C, регулируемый диапазон, точность ±2°C, поддерживающий различные функции измерения температуры: измерение температуры точки, линии и ящика,подчеркивая самую высокую температуру с помощью курсора, и обнаружение и отслеживание источников тепла.
- Инфракрасный термокамер имеет функцию противопоколения изображения, поддерживающую различные функции улучшения деталей изображения, такие как ложный цвет, снижение шума 3D, ручная AGC, коррекция затвора,и коррекция оптической проницаемости.
- У него есть функция получения изображения и передачи в режиме реального времени и визуального поиска источника огня.и оригинал сертификата должен быть доступен для проверки.
3.5 Конфигурационные параметры терминала дистанционного управления
- Размеры: 41031070 мм (без учета высоты джойстика)
- Вес всей машины: 5,5 кг
- Дисплейный экран: высокояркий OLED жидкокристаллический экран не менее 10 дюймов, сенсорный, изобразительный и цифровой интегрированный высокоинтегрированный экран, более удобный в ношении,с самостоятельно разработанной операционной системой пожарного робота.
- Система управления Платформа: операционная система Windows 10, процессор: Intel I7-7500u
- Рабочее время: 8 часов
- Основные функции: интегрированная портативная конструкция пульта дистанционного управления и монитора, оснащенная эргономичным ремнем, позволяет одновременно просматривать и управлять.Он стабильно представляет изображения окружающей среды на сайте для удаленных операторов, отображает состояние батареи, угол наклона робота и сигнализацию о концентрации токсичных и вредных газов в режиме реального времени и контролирует движения робота, такие как движение вперед, назад и повороты.Он также управляет монитором воды для выполнения таких действий, как, вниз, влево, вправо, постоянный ток, атомизация и самоколебание.и вокруг робота в реальном времениСпособ передачи данных - беспроводная передача с использованием зашифрованных сигналов.
- Панорамная функция мониторинга: может удаленно отображать 360-градусное изображение тела робота.
- Запись и воспроизведение видео: может записывать видео в любое время.Он может быть воспроизведен непосредственно на терминале дистанционного управления или скопирован на другие устройства.
- Функция проекции экрана: It can be connected to a projection device such as a projector through an HDMI interface to display the real-time images and data collected by the robot at the rescue site through the projection device, способствуя совместному обсуждению и принятию решений командирами операций.
- Функция управления ходьбой: с помощью трехосевого джойстика робот может гибко управляться, чтобы двигаться вперед, назад, повернуть влево и направо.
- Функция управления пожарным монитором: с помощью трехосевого промышленного джойстика можно управлять монитором воды для выполнения таких действий, как вверх, вниз, влево, вправо, постоянный ток и атомизация.
- Управление переключателем подъема системы разведки: осуществляется с помощью автоматически переставляющегося моментального переключателя.
- Функция переключения видео: реализуется с помощью моментального переключателя с самоустановкой.
- Управление функцией автоматического вытягивания пожарного шланга: осуществляется с помощью автоматически сдвигающегося мгновенного выключателя.
- Функция управления иллюминатором: реализуется с помощью автоматически переставляющегося мгновенного переключателя, и хост-компьютер реагирует на самозаключение.
- Вспомогательные инструменты: плечевой ремень портативного терминала дистанционного управления
- Портативный пульт дистанционного управления (необязательно): оборудован ручкой портативного пульта дистанционного управления, который имеет небольшие размеры и удобен в использовании. Он облегчает быстрое подключение во время переноса корпуса транспортного средства,повышает эффективность работы оператора, и уменьшает нагрузку на оператора.
3.6 Интернет-функции
- Функция GPS: GPS позиционирование, и трасса может быть запрошена.
- Система облачной платформы управления аварийным противопожарным оборудованием (необязательно)
- Оборудование может быть подключено к облачной платформе управления оборудованием для удаленного мониторинга:
- Платформа облачного управления оборудованием может удаленно отслеживать информацию об оборудовании, информацию о газе и видео, проводить статистический анализ, автоматически проверять срок действия оборудования,автоматически напоминает о истекшем сроке службы оборудования статистические данные, и проводить комплексное управление и применение для обеспечения своевременности оборудования.
- Оборудование может быть подключено к платформе управления облаком оборудования для визуализации:
- Он имеет визуализацию оборудования большого экрана дисплея, функции графического анализа, дисплея флуктуации данных диаграммы, прокрутки данных дисплея, всеобъемлющей функции области отображения,Статистика использования оборудования, анализ тенденций данных в режиме реального времени и вспомогательные функции принятия решений, могут отображать несколько графических изображений, полное общее отображение нескольких продуктов и удовлетворять особым потребностям.
- Оборудование может быть подключено к облачной платформе управления оборудованием для ПК и дисплея APP с автоматической синхронизацией данных в режиме реального времени.
- Оборудование может быть подключено к облачной платформе управления оборудованием: через смартфоны, планшеты или другие терминалы, основная информация, такая как название оборудования, дата, контактный человек, модель,параметры, категории, единиц и изображения, а также статистические данные различных данных, таких как количество использования, количество выпуска, количество заимствований, количество обслуживания,и количество сброса может быть осуществлено, и оборудование может быть статистически проанализировано онлайн в режиме реального времени.
- Через облачную платформу управления оборудованием, операции и запросы по добавлению, модификации, удалению, заимствованию, выдаче, регистрации, неисправности, ремонту, отказу от оборудования,и историческую информацию различной информации может быть выполнена.
- Терминал может запрашивать использование оборудования блоков на разных уровнях через облачную платформу управления оборудованием, проводить многоуровневые межрегиональные, междоменные,и межпровинциальное развертывание и строительство, и выполнять динамическое планирование и мониторинг оборудования в режиме реального времени.
- Платформа облачного управления оборудованием поддерживает удаленное обновление прошивки оборудования одним щелчком мыши.
|



























 Ваше сообщение должно содержать от 20 до 3000 символов!
Ваше сообщение должно содержать от 20 до 3000 символов!